
详解 iStar sCMOS 相机 PIV 时序逻辑,科研实验直接套用
理论根基扎实,实操才能从容高效。上一篇《高阶应用篇 | iStar sCMOS相机重塑 PIV 检测方案》中,已经详解 iStar sCMOS 相机适配 PIV 应用的核心优势。但想要将设备优异性能,转化为实验室精准稳定的实测数据,规范且合理的前期配置是关键前提。本文将循序渐进,拆解硬件接线、软件参数设置等全流程核心要点,带您了解 PIV 测量实操要点,高效完成整套实验搭建。

▌软硬件连接:打通触发“任督二脉”

▲图1:iStar sCMOS相机背面板各种触发和通信接口图示
有多种相机的触发模式和操作模式可用于PIV测量。图1显示了相机的各种硬件接口,图2显示了软件操作界面。以下讨论中,均假设您对 isCMOS 的操作[1]有一定的熟悉程度。
对于每种配置情况,通常建议 iStar sCMOS 采用以下软件/系统设置,
sCMOS传感器部分设置:
• Global shutter模式;
• Trigger 模式选择 External Exposure(以下简称 ExtExp 模式);
• Acquisition Mode 选择 Kinetic series(序列长度需设置为2的整数倍,最小设置为2);
• Readout 对话框中 Overlap readout 打钩(以下简称为 Overlap 模式 ON );
• Readout speed 设置为 560MHz(最高读出速度);
• 背面板 Pre-TRIG 接口连接到外部同步源。
像增强器部分设置:
• Gating mode 可设置为DDG模式,Gate Only 模式或Fire and Gate 模式
• Insertion Delay 设置为 Fast(也可能使用普通的insertion delay,但 Intelligate 功能必须关闭)
• 下面两种连接方式二选一:
a) 如果使用 DDG 模式,则背面板 EXT-TRIG 连接到外部同步源,注意这个触发是独立于 PRE-TRIG,且相对于 PRE-TRIG 来说延时可变的;
b) 如果使用 Gate Only 或 Fire and Gate 模式,则背面板DIRECT GATE连接到外部同步源。同样地,这个触发也是独立于 PRE-TRIG,且相对于 PRE-TRIG 来说延时可变的。
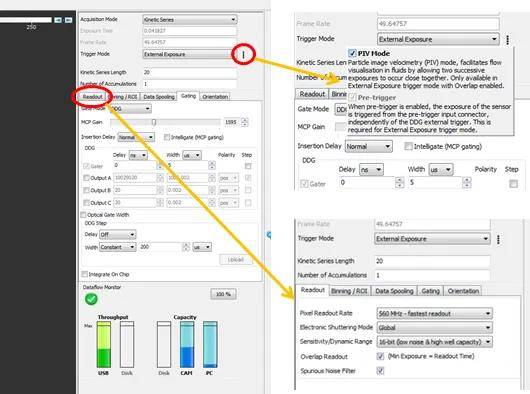
▲ 图2:iStar-sCMOS 相机软件界面截图
▌理解时序:看懂PIV的“心跳”
标准时序解读
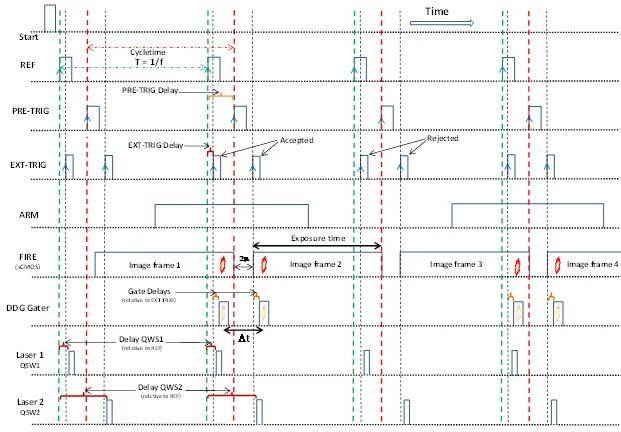
下方图3显示了与上述设置一致的详细时序图。具体来说,在这个例子中,门控模式被设定为 Gate Only,外部同步源通过多个触发通道控制激光和相机的触发。
示意图(非实际比例)显示了触发脉冲的上升沿和下降沿彼此如何随时间演变;水平轴为时间。在图的上半部分,显示了系统的 sCMOS 传感器部分(ARM、FIRE 和 sCMOS的电荷传输)的时序,中间是像增强器(Gater),下半部分是激光器的时序触发器,以及激光双脉冲的示意图。在这个例子中,假定调Q双脉冲激光器是光源,用于产生激光脉冲的触发表示为 QSW1 和 QSW2。注意,在真正的双脉冲激光器中,需要有早于 QSW1 的触发来激励闪光灯,但为了简化起见,这里省略了这些触发。
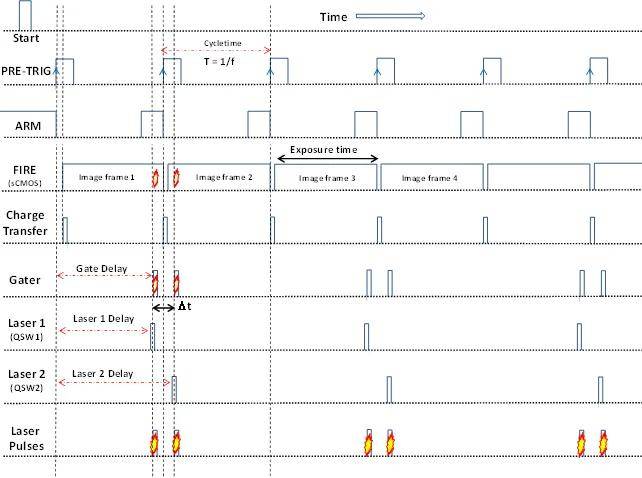
▲图3:用于控制 PIV 图像对采集的各组件 TTL 触发脉冲的时序图。相机设置为 Global shutter 模式,ExtExp 模式,Overlap 模式ON,Direct Gate 门控模式;通过Q开关控制产生双激光脉冲;外部同步源触发
以下是对图3各部件触发时序的解释:
• 初始化(START)后,外部同步源向sCMOS传感器(PRE-TRIG)发送一系列外部触发脉冲;上升沿触发。
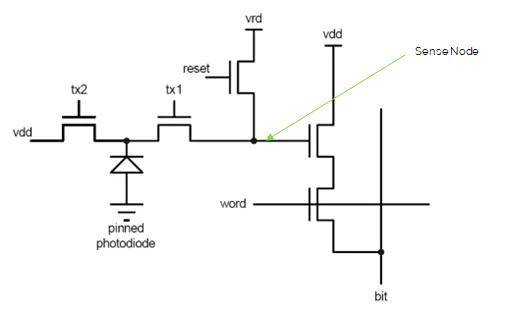
• 如果ARM电平为高,sCMOS 被触发开始曝光,通过Global Clear 将任何残留电荷从感光区域的像素移动到每个像素的读出节点(像素清零,且只有5T结构的Global shutter 的 sCMOS 像素内有这个节点寄存器,见下图 Sensor Node),以“净化”像素来接收第一帧图像的信号。
• 在新的曝光开始时,ARM电平变低,并将一直保持低电平直到 sCMOS 传感器准备好接收新的外部触发;这里允许的最小低电平时长是将读出节点(Sensor node)的电荷读出两次的时间差,一次为参考信号,一次为实际图像数据。
• 同样在新曝光开始时,FIRE电平会变高,并在曝光时间内保持高电平,当它变为低电平时,sCMOS传感器就会将图像信号传输到像素读出节点,然后再次上升以指示下一个曝光周期的开始。
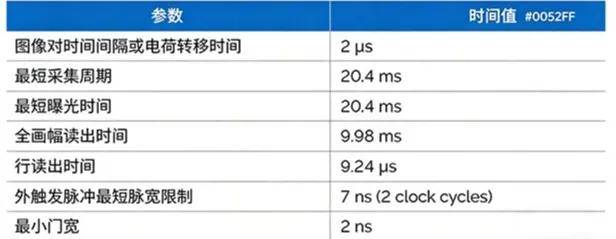
• 电荷转移表示图像信号电荷从每个像素的光敏区或“有源”区转移到像素的读出节点的时间。在ExtExp模式下运行时,这个转移时间可短至2µs。
• 像增强器或 Gater 触发是独立于 sCMOS 传感器触发的,如图所示,通常由两个时间上靠近的门脉冲触发,每个门脉冲的宽度都足以捕单脉冲的光信号——在第一个曝光周期后期(见FIRE)的某个时间有一个脉冲,在紧接的曝光周期的前期有第二个脉冲,中间有一个“曝光帧间”转移(电荷转移)。
• 激光器的双脉冲通过外部同步源与像增强器的 Gating以及图像帧精确同步,门控延迟和激光延迟都可以独立控制。
Pre-TRIG优势
除了标准的外部触发输入(通过EXT TRIG)外,iStar sCMOS 还设计了另一种外部触发输入——PRE-TRIG输入,这使得 sCMOS 传感器可独立于 DDG 进行灵活触发。在软件上把相机的触发模式设置为External,这样PRE-TRIG 就允许在外部同步源的控制下,让 sCMOS 传感器的触发早于像增强器。当考虑相机电子电路的插入延迟时,sCMOS 传感器相对于像增强器存在显著的时间延迟。在大多数情况下,我们可以很容易地通过使用内部DDG来控制像增强器的延迟使之与 sCMOS 同步,或者在外部同步源中分别调整两路触发的延时使像增强器与sCMOS 同步。然而,在某些情况下,例如使用某些激光器时,需要增强器拥有最小插入延迟(insertion delay),此时就体现出了PRE-TRIG输入功能带来的显著好处了。
ExtExp模式原理
当相机设置为 ExtExp 模式,Overlap 模式ON时,外部输入的 TTL 脉冲的每个上升沿都将触发上一次曝光的结束和下一次曝光的开始,TTL 脉冲的周期定义了曝光周期。两次曝光由电子“电荷转移”时间(2µs,sCMOS决定)或Δt(客户自定义)——见图3。请注意,如果外部触发脉冲的周期小于系统允许的最小曝光时间,则一些上升沿(触发)将被忽略。为了在整个采集序列中具有相同的曝光周期以获得最稳定的性能,应将外部触发周期设置成匹配系统允许的曝光周期。
重要参数表
▌进阶技巧:利用内置“PIV模式”
在为序列 PIV设置时序时,其中一个挑战是每个图像对的采集和主帧率的同步,其中图像对以主帧率的一半速率采集。为了简化触发方案和对外部同步源的要求,软件中加入了一个与 DDG一起使用的“PIV模式”选项。该选项为ARM脉冲提供了特定触发模式的选择。在这种情况下,ARM被设定为只间隔地接受主触发脉冲,并拒绝另一个脉冲的触发。
下方图4显示了利用此功能的详细时序方案:
▲ 图4:时序图,表明使用“PIV”模式选项(带ExtExp模式)来控制DDG时,每隔一个主触发脉冲才触发光电阴极一次
一旦接收到 START 信号,主时序单元或外部同步源就会生成其预先设定的参考触发频率 REF(主脉冲),并通过多个独立通道将不同延时的触发信号传递给 Pre-TRIG、EXT TRIG 和光源(以调Q双脉冲激光器为例)。在每个主脉冲周期,外部同步源会向 EXT TRIG 提供双触发脉冲;传递到 DDG 的双 EXT TRIG 脉冲的间隔决定了图像对的时间间距,双脉冲的宽度定义了“有效曝光时间”。如图所示,ARM 被设定为仅在 DDG 的交替触发脉冲组时变高。值上述设置可以用两个 SRS 的 DG535延时发生器来实现。
▌参考文献
[1]http://velocimetry.net/application.htm;https://en.wikipedia.org/wiki/Particle_image_velocimetry
*本篇技术应用原文出自牛津仪器科技(上海)有限公司。