
电阻网络+折纸力学,这款可编程折叠组件让机器人拥有了“形态自由”
近年来,柔性机器人与可重构机器人凭借其独特的结构特性,已成为机器人研究领域的前沿热点方向。然而,在空间受限、地形复杂以及异形物体操作等实际应用场景中,多数此类机器人仍存在明显的性能局限。其核心问题在于,这些机器人的折叠路径与行为模式大多在出厂时就已被固定,缺乏根据实时任务需求进行“现场再配置” 的能力,这导致它们在应对动态变化的环境时往往显得灵活性不足。针对这一技术瓶颈,研究人员围绕如何在材料层面赋予机器人形态重构、功能切换与智能响应能力,进而拓展其应用边界展开了积极探索。
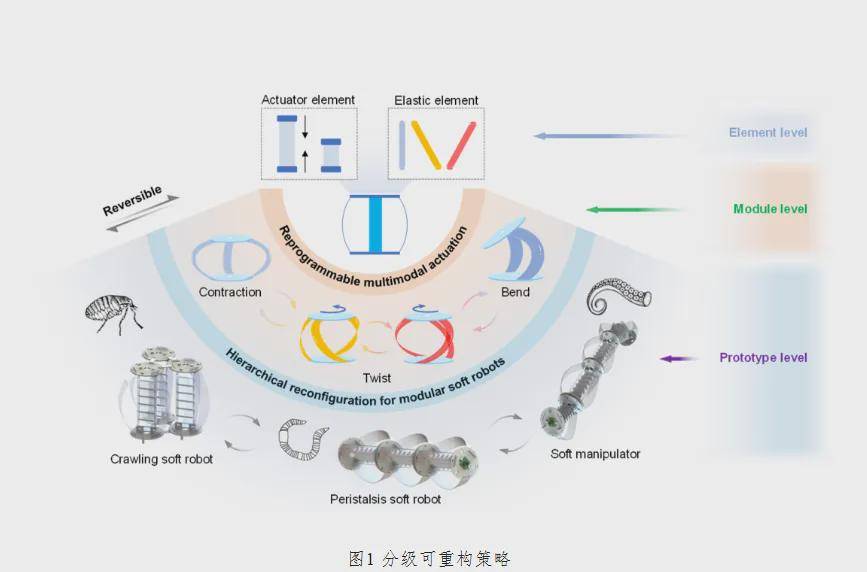
折纸工艺通过极简的结构单元即可达成显著的形态变换,且无需额外机械部件,这种“以简驭繁”的特性为突破传统柔性机器人和可重构机器人的局限提供了重要思路。基于此,不少研究人员以折纸结构为灵感来源,尝试研发“可在使用中重新编程”的折叠结构,期望通过灵活调整折叠方式,使机器人在不同任务中实现自主适应与动态变化。
▍提出可编程机器人折叠组件
前不久,来自韩国科学技术院机械工程系Jung Kim 团队的研究人员在这一研究方向上取得了新进展。该团队通过将折纸力学原理与分布式电子控制系统相结合,提出了一种现场可编程机器人折叠组件(Field-programmableRoboticFoldingSheet)。
据了解,该现场可编程机器人折叠组件集成了金属电阻网络阵列,其每个电极区域都能够独立进行加热与温度感知操作,这一设计使其在部署后仍可实现“可控的任意折痕分布与角度调节”。与传统预设结构的机器人相比,该组件在使用过程中可根据任务需求灵活设定折叠方式,折叠角度范围可达−87°至+ 109°,并且支持爬行、翻转、抓取等多种形态的运动,能够较好地适应风吹、温度变化等外部环境扰动。
该现场可编程机器人折叠组件的应用,不仅有助于提高柔性机器人和可重构机器人自主系统的多功能性和环境适应性,使其能够在不可预测的地形上更有效地发挥作用,还推动了机器人技术从“可重构”向“可再编程形态智能”阶段发展,将为未来多场景机器人部署、环境自适应系统、太空折叠结构、灾难救援机器人等领域的发展提供重要技术基础。目前,该研究成果的相关论文已以“Field-programmable robotic folding sheet”为题,发表在《Nature Communications》期刊上。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍创新材料与布局设计
研究团队选用热塑性高分子薄膜材料作为载体,在其表面构建一张可寻址的电阻网络阵列,该阵列既可发热,又能实时感知温度,为精确控制折叠状态提供了硬件基础。
使用电器驱动原理,利用嵌入式电子设备以此达到折叠板外部自主性动作。在薄膜基底上安装一组分布式联网金属电阻器,每个电阻器都用作加热器(根据欧姆加热原理)和热感受器。折叠区域或铰链被密集的电极连接在电阻器之间,通过重新分配电能以此实现折叠板的重新配置。
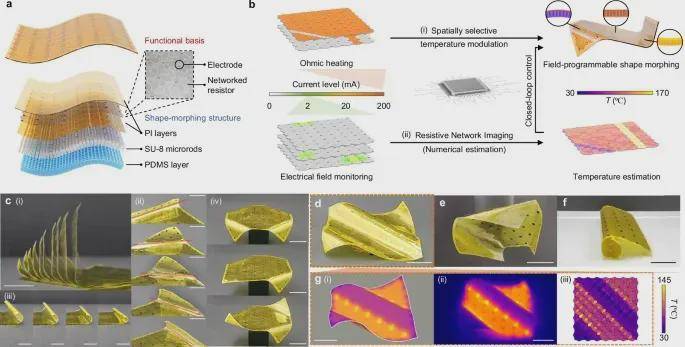
在基础功能设计中,电阻网络几何形状和电极布置,是在可访问的形状配置中实现高度自由度的第一步。电阻网络的构建块采用居中方形晶格的形状,其中包含四个在单元晶格中心互联的辅助电阻。单元结构与箱型褶皱折纸图案非常相似,其灵活的排列可以作为通用形状的近似器。研究中的机器人折叠片采用0.9 ×0.9厘米单元格进行7×7网格排列,形成一个6.3×6.3厘米的正方形,总共嵌入308个电阻器。电极布置在每个晶格的顶点,采用直径50μm(AWG45)的超细线焊接连接,减少张力导致的机械干扰,同时形成8×8的网格配置,使用这种网络域的布局设计使得器人折叠板能够进行灵活的折叠形变。网络电阻器通过定制蛇形形状进而实现加热时的空间均匀性,并将其装入进行筝形连接,以确保现场可编程机器人折叠组件在布置时能完全占据表面。
由于电热形状变形机制采用双层结构,使得不同层结构之间存在热膨胀不匹配的风险。考虑到该情况,研究团队在各种材料中选择了一堆聚酰亚胺(PI)和聚二甲基硅氧烷(PDMS)可以提供较大的曲率响应度。
▍可编程电热折痕机制
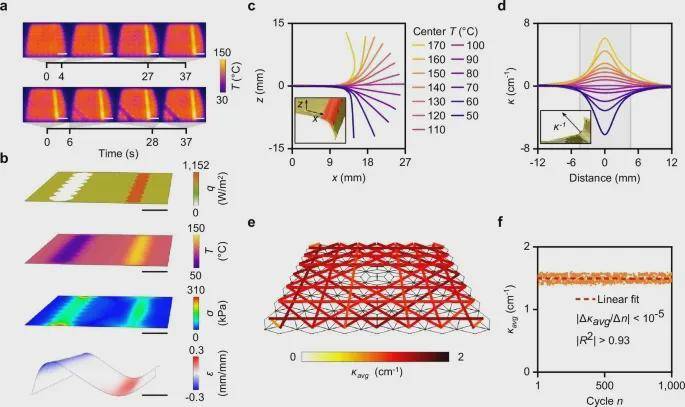
研究团队借助调节各个区域的加热强度和时长实现折叠的现场编程,即根据用户的变形命令(需实现的温度变化分布),借助电子手段对折叠的区域、方向、和程度进行精准调控。折叠的现场编程相当于在用户指导下调节温度分布,称为变形命令,这可以通过直觉或计算形状预测来决定。将变形命令分解为一组等位变形意图,包括变形基、分割区域的二元指示和变形率,并通过脉宽调制(PWM)方案驱动这些模块化意图的堆栈。
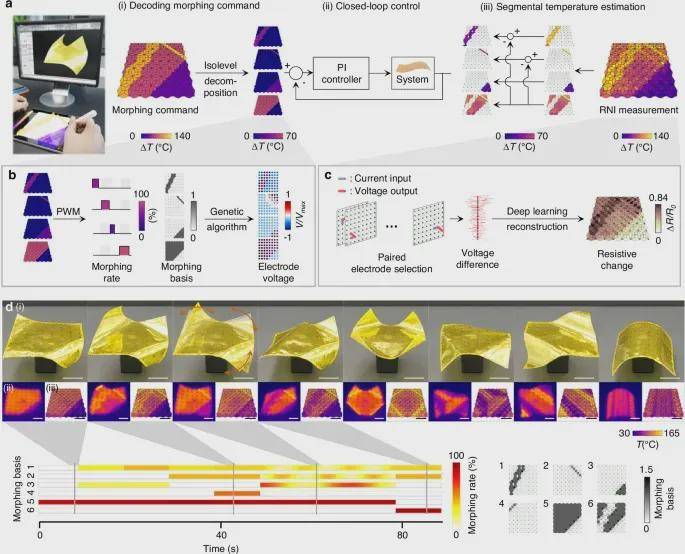
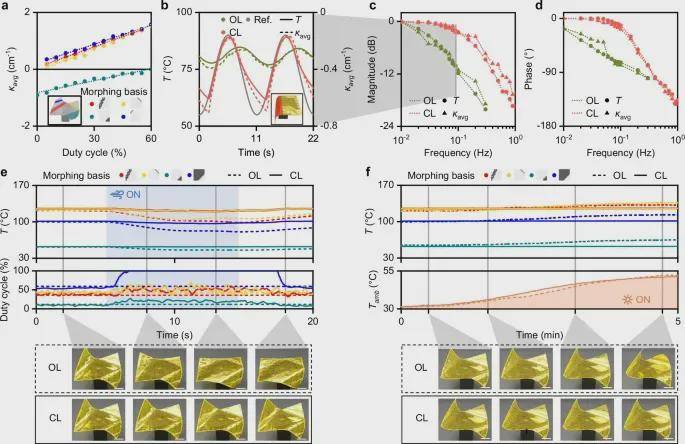
为了实现可靠的电压预测,研究采用遗传算法解决电压与电功率分布之间关系的高非凸性和非线性问题。该算法经过大量的搜索和迭代优化,在<0.8s内完成单组变形基的求解,且支持并行计算解码,确保快速响应。脉冲时间段选择为8ms,以平衡系统带宽和功率效率,且温度变化与占空比呈现高线性度(R2>0.993),便于校准占空比与变形率的关系。在给定变量后,利用占空比控制实现快速线性的电热响应,从而达到可靠温度调制。
▍闭环温控控制系统
研究团队运用电阻网络成像(RNI)作为温度检测的核心手段,结合比例-积分(PI)控制算法和现场可编程门阵列(FPGA)驱动的电子设备,形成“测量-反馈-调节”的闭环链路。其核心逻辑是通过实时监测折叠片的温度分布,动态调整电热刺激参数,使实际温度与目标温度保持一致,进而精确控制折叠曲率。
温度监测:RNI技术的实时感知
温控系统通过电阻网络成像(RNI)技术实时感知进行温度监测,基于电阻抗断层扫描(EIT)原理,通过图案化、重复募集电极对进行电流注入和电压测量,获取电阻分布信息。采用深度学习重建方法,实现快速(每帧约15ms)、高精度的分布式温度测量。
控制算法:PI控制的实时调节
针对每个变形基(折叠区域的模块化单元),通过PI控制器对脉宽调制(PWM)的占空比进行调节,实现温度的精准伺服。PI控制器参数(P=0.4,I=0.009)经优化设计,可有效应对热扰动的慢动态特性,减少稳态误差并缩短响应时间。
硬件支撑:FPGA的高速协同
基于FPGA的紧凑型电子设备实现功能的快速调度:驱动单个变形基耗时约8ms,RNI传感每帧耗时约15ms,功能切换仅需275ns,确保实时性。通过非重叠关注机制对各变形基的温度进行分段估计,避免区域间干扰,提升控制精度
利用该温控系统,能有效规避现场可编程机器人折叠组件过热、误折等问题,提升可靠性与环境适应力。即便在风扇干扰或室温剧烈变化条件下,依然保持折叠精度稳定。
▍多功能应用场景验证
在研究中,团队对现场可编程机器人折叠组件进行了外形探测漫游车模拟、物体抓取、地形移动等场景试验。
外星探测漫游车模拟场景
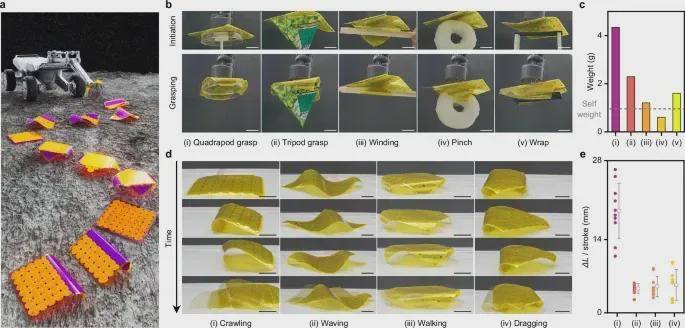
作为概念验证,现场可编程机器人折叠组件通过简化的硬件设计实现多用途操作。其核心是借助现场可编程性,根据外星复杂环境的探测需求,动态调整自身形态,以适应不同的探测任务,比如在不同地形下改变结构来完成样本采集或环境观测等操作。
物体抓取场景
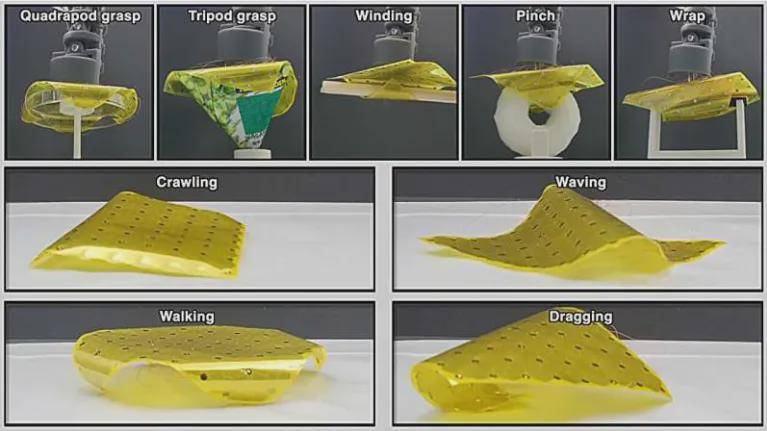
现场可编程机器人折叠组件作为刚性结构的替代方案,能与易碎或未知物体、生物体及周围环境进行温和、顺应的物理交互。它可在线和按需编程多吊舱抓取、缠绕、捏合或缠绕等动作,以适应各种物体拓扑结构。例如,针对不同形状和材质的日常物品(如培养皿、零食、木棍、海绵、橡胶垫等),折叠板会根据物体特征调整折叠方式,完成从接触到稳固抓取的过程,且能实现最大有效载荷重量比为 4 的抓取效果。
地形移动场景
在崎岖、模糊等具有挑战性的地形中,现场可编程机器人折叠组件借助现场可编程性,模仿爬行、挥手、行走和拖动等多种生物启发的动作。通过顺序变形基础招募的精细调度和闭环温度控制系统,每种动作每冲程可产生不同的位移(爬行 26.44mm、挥手 8.85mm、行走 6.27mm、拖动 9.80mm)。其过程主要是通过调整不同区域的折叠角度和顺序,实现身体的移动和姿态变化,以适应复杂地形。
依托现场可编程机器人折叠组件的动态折痕调节、电热控制及闭环温控等核心技术,实现了其在不同场景下的形态重构与功能适配。
参考文章:https://www.nature.com/articles/s41467-025-61838-3