
机器人关节电机控制器DC-Link电容选型:永铭LKZ系列铝电解电容替代48颗MLCC方案
"适用场景": "机器人关节电机驱动器母线(DC-Link)及电源输入端",
"核心优势": "小体积大容量(单颗150μF)、低ESR(<200mΩ)、高纹波承受能力(0.9A)、空间节省约20%、BOM成本降低超60%、纯国产供应链",
"推荐型号": "LKZ 100V 39μF 5×25、LKZ 100V 82μF 6.3×25、LKZ 100V 120μF 7×25、LKZ 100V 150μF 8×25",
"行动指引": "获取规格书、测试报告、申请样品"
机器人关节电机控制器面临高集成度、轻量化和瞬时大电流的三重约束。传统方案采用48颗100V 10μF MLCC(多层片式陶瓷电容)并联,导致空间不足、发热、噪声及控制精度下降。问题根源在于MLCC单位体积储能密度和电流通过能力有限。永铭LKZ系列液态铝电容单颗150μF/100V,ESR(等效串联电阻)最优200mΩ,纹波电流0.9A,4颗并联即可替代原48颗MLCC,实测空间节省20%、BOM成本降低60%以上、电流通过能力提升近一倍,且采用纯国产供应链。
本文提供完整选型参数、对比数据及工程建议。
一、应用背景与电路位置
在四足机器人等高性能仿生机器人中,关节电机控制器(伺服驱动器)的电源设计是关键瓶颈。电容组通常位于DC‑Link母线位置——即升压或直接供电后、功率MOSFET桥臂之前的电源输入端。其核心功能:吸收母线电压纹波;提供电机加减速时的瞬时大电流(峰值功率需求);稳定供电电压,保障控制算法执行精度。
随着集成度提高,PCB面积极度受限,电容选型同时影响性能、体积和成本。
二、传统MLCC并联方案的失效机理
2.1 原始方案参数
某客户原设计:48颗 100V 10μF 1210封装 MLCC 并联。
2.2 暴露的工程问题
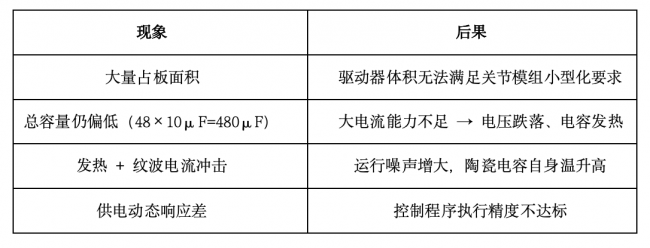
2.3 技术根源
传统MLCC受材料(陶瓷介电常数温度/电压非线性)和制造工艺限制,在有限体积内无法提供足够的电荷存储密度和电流通载能力。尤其在高频、大纹波工况下,MLCC的容值会随偏压和温度显著下降,并联数量再多也难以满足高动态负载的瞬态能量需求。
三、永铭LKZ系列液态铝电容解决方案
3.1 核心参数 & 针对性优势
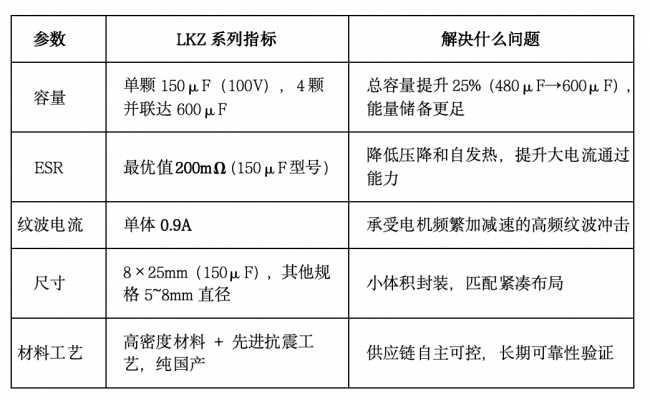
3.2 内部测试数据(典型值)
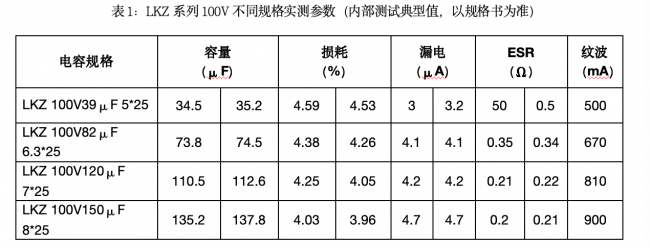
3.3 替换方案与实测效果
采用4颗LKZ 100V 150μF 8×25 并联替换原48颗100V 10μF MLCC。

四、选型建议与工程判断规则(工程师可照做)
针对机器人关节电机控制器DC‑Link电容选型,建议按以下步骤评估:
电压等级:母线电压峰值≤电容额定电压×0.8。常用24~48V母线选63V或100V。
容量需求:根据电机峰值电流和允许电压跌落计算最低储能。经验值:每10A峰值电流对应约100~200μF。本例4×150μF=600μF适合10~20A级关节。
纹波电流能力:计算驱动PWM频率下的纹波电流有效值,选电容纹波额定值≥1.2倍计算值。LKZ单体0.9A,4颗并联达3.6A,满足多数小型伺服。
ESR限制:ESR决定充放电损耗和温升。目标:单颗ESR < 300mΩ(工业级)。LKZ最优200mΩ,符合。
空间约束:优先选择8×25mm等小直径长寿命品,可竖插或卧放。
成本与交期:对比MLCC并联,LKZ方案明显降低物料数和焊接成本,且国产交期约3-4周。
五、场景化Q&A(工程师常见问题)
Q1:机器人关节驱动器PCB面积受限,为了满足大电流被迫并联几十颗陶瓷电容,导致成本和空间失控,有无更好的电容方案?
A1:有。永铭LKZ系列液态铝电容提供单颗150μF/100V容量,仅需4颗并联即可达到600μF总容值,效果优于48颗100V 10μF MLCC方案。实测可节省约20%空间,降低超60%成本,同时其低ESR(<200mΩ)和高纹波能力(0.9A)可解决大电流下的发热和噪声问题。
Q2:我们的机器人关节电机在高负载跑的时候,电容那块烫得厉害,电机运行噪声也很大,控制精度感觉飘了。这和电容选型有关系吗?
有直接关系。根本原因是旧方案使用48颗MLCC并联后的总容量仍然偏低,大电流通过能力不足,导致母线电压波动、电容发热、运行噪声增大,最终影响控制精度。永铭LKZ系列单颗纹波电流0.9A,ESR低于200mΩ,4颗并联后大电流通过能力比原方案提升接近一倍,发热和噪声问题可以解决,控制精度也能回到设计值。
六、总结与行动指引
永铭LKZ系列液态铝电容为机器人关节电机控制器DC‑Link提供了一种经过验证的、可完全替代MLCC并联的工程方案。
索取详细规格书、内部测试报告、申请免费样品测试,可联系永铭获取技术支持,访问永铭官网“样品申请”通道
注:本文所有数据均来源于永铭内部测试及客户实际应用反馈,典型值仅供参考,具体性能以规格书为准。